I have been doing AI with Perl for a few decades.
Now — 3 decades into Perl — I think it is time
to turn the predicate around
and let AI do Perl.
→ main arc ↓ deep dive
Prologue Since last time...
GPW 2016 · Nuremberg · "KI: Wie testet man ein Hirn?"
That was 10 years ago. A lot happened.
"Patience you must have, my young Padawan"
This prologue is not about Perl — but it is necessary context.
The classified stuff
Some things are better left unspoken.
What I can show you today is roughly half of what happened.
→ moving on
PV & Energy Systems
Designed, built, automated
Victron ecosystem · Perl monitoring & control
PV & Energy Systems

Reference S1 · Nuremberg
~24 kWp · 45 kWh · 80+% off-grid · feed-in

Reference J2 · Prague
40 kWp · 120 kWh · 100% off-grid
Villa-A
A technocrat's house — 2050s standard
1400m³
Heated volume
700t
Thermal mass (concrete)
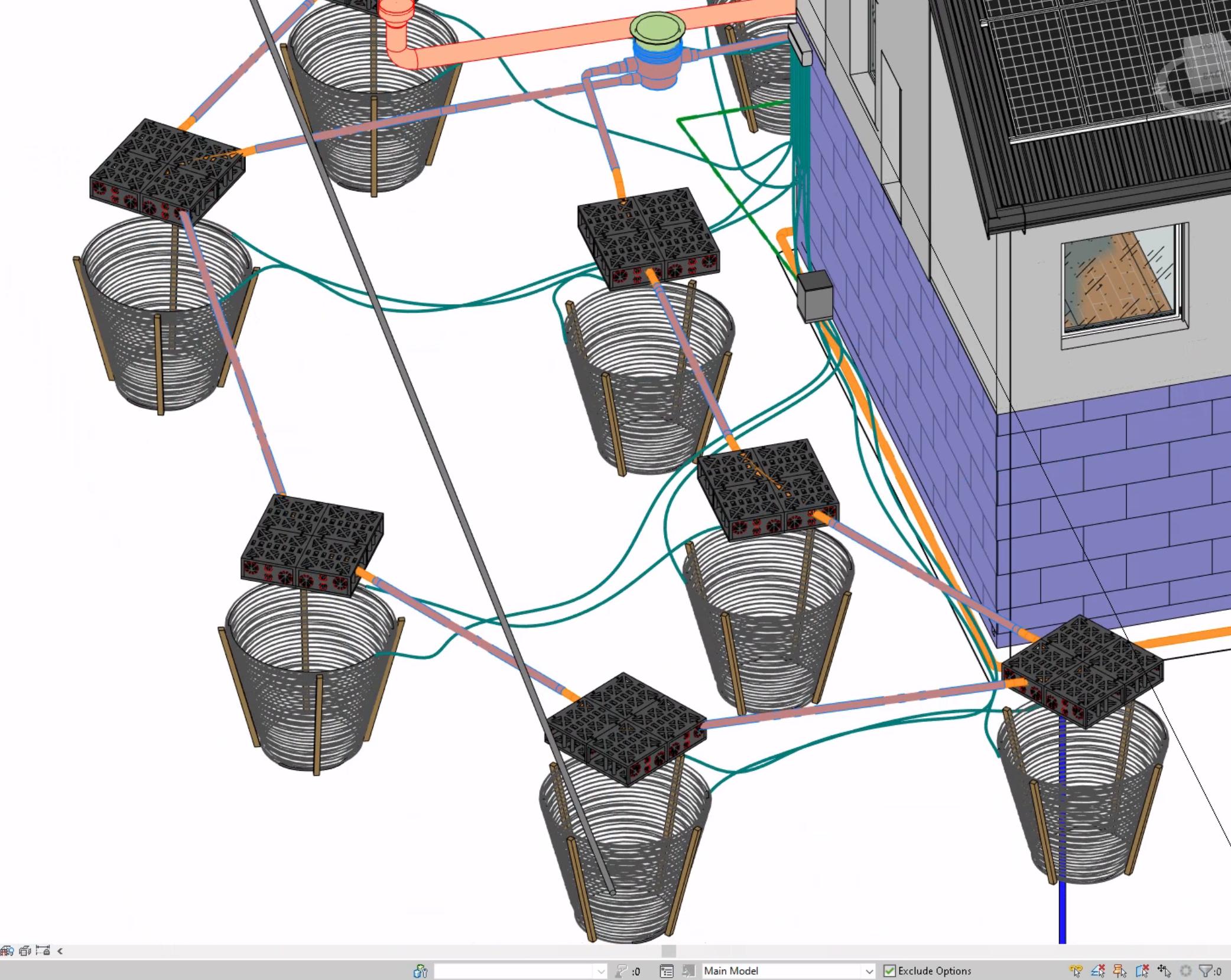
Fiber-reinforced concrete Geothermal (Erdwärmekörbe) Capillary ceiling mats Full home automation Off-grid energy 40kWp solar 120kWh battery
Villa-A — Construction
Villa-A — Construction

Villa-A — Construction

Villa-A — Construction

Villa-A — Construction

Villa-A — Construction

Villa-A — Construction
Villa-A — Construction

Villa-A — Systems
- Erdwärmekörbe, WP — heizen, kühlen (passiv)
- "Klimamatten" — Deckenheizung, Kühlung (BEKA → Berlin)
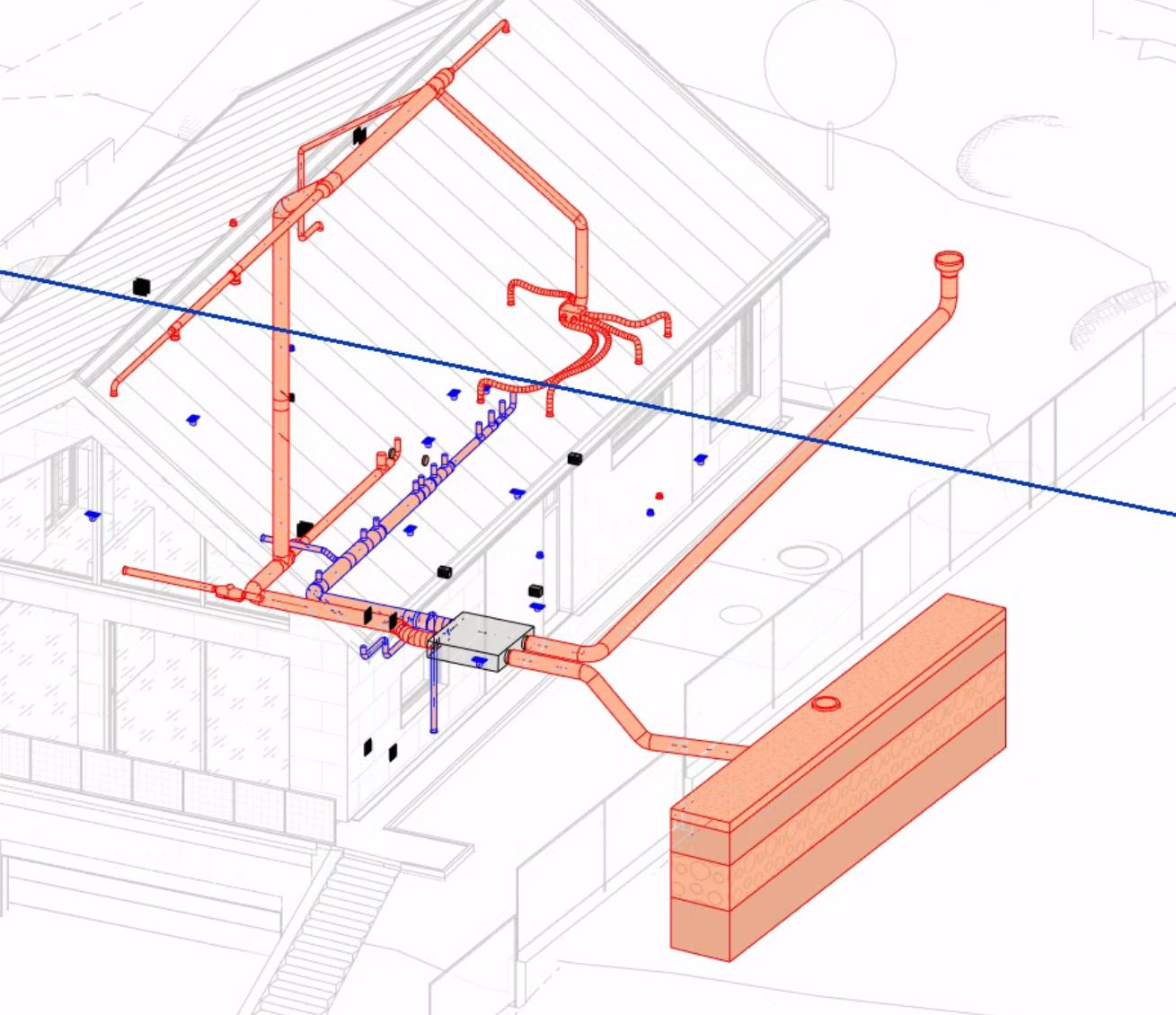
- Luftbrunnen, KWL
- Privatkraftwerk (Offgrid)
- Wasserwerk / Wasseraufbereitung
- Digitale Lichtsteuerung, DALI "Full-Stack DC" (DALI-SELV)
- ... und haste nicht gesehen
...and it all needs to be controlled.
A house this complex needs an automation system
that doesn't exist yet.
→
02 WHIP
Witty House Infrastructure Processor
PV — Perl Integration
First tools: Victron Modbus + ECS BMS — all in Perl
$ ecs_bms_tool -range 1-16 # query all battery modules
$ ecs_bms_tool -get cell_voltage -get cell_temperature
$ ecs_bms_tool -otype json # JSON for pipeline integration
$ Wmodbus discover 192.168.2.0/24 # find Modbus devices on network
$ Wmodbus --host 192.168.2.201 --unit 2 read holding 0-10
$ Wmodbus --host 192.168.2.201 --profile vents-dbe900l monitor
ecs_bms_tool — ECS LiPro BMS management (SoC, cell voltage, balancing)Wmodbus — Modbus TCP/RTU: discovery, read/write, device profiles, monitoringWcli — solar irradiance & PV power calculatorWthermal — physics-based house thermal model
Scripts work. But a house is more than solar panels.
Looking for a Smarthome
Preferably in Perl, obviously.
![]()
FHEM — Perl. Active. Tried it. Suffered.
![]()
WHIP — "I'll build my own."
The FHEM Experience
"We do not like CPAN" — dependencies create problems. So we reimplement everything ourselves. But worse.
"We do not like PBP" — contributions are done by amateurs. Too high expectations would kill contribution.
"Efficient algorithms are overrated" — "So what? That's 0.1s faster?"
"Tests? TDD? That's superfluous work!"
"I don't like you, you cannot use my GPL code"
 svn.fhem.de/trac/browser/trunk/fhem
svn.fhem.de/trac/browser/trunk/fhem
(FHEM people: no offense. Well, maybe a little.)
Nice idea. Wrong execution.
✓ Open-source, DIY, community-driven
✓ Tree topology with auto-routing & self-healing
✓ Up to 254 nodes × 254 sensors — decent scale
✗ Arduino — ATmega328? For a house? In 2020?
✗ Arduino software model — Endless loop with stuff in it.
✗ RS485 / nRF24L01+ — Master-Slave Architecture
✗ Text protocol — semicolon-delimited ASCII over serial. In 2020.
✗ No autonomous operation — nodes depend on gateway/controller
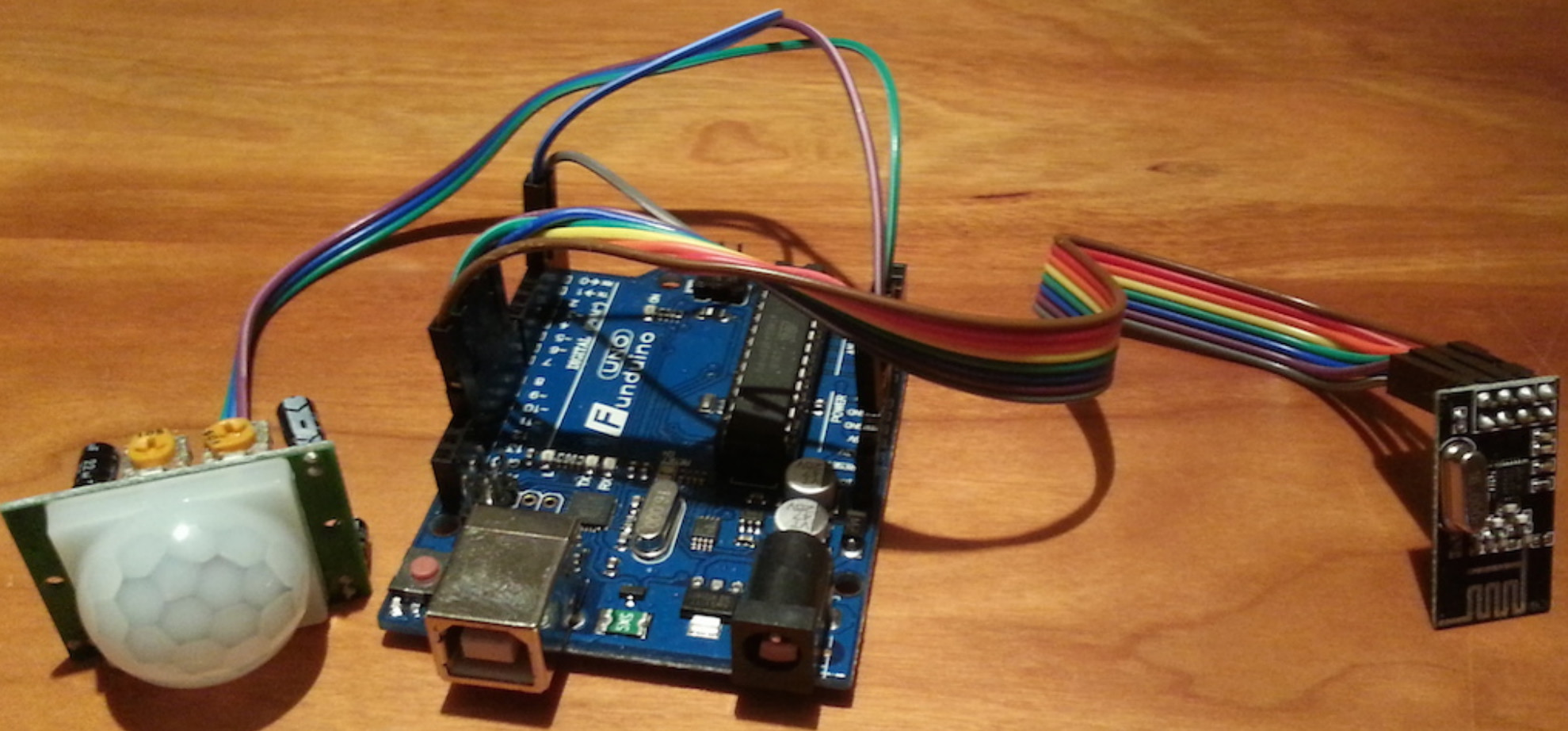
I felt there had to be something better.
Birth of a Node
CAN bus instead of RS485
Multi-master · Inherent collision resolution · Resilient
Good enough for cars for decades. Industrial standard.
1 MBit instead of EIB/KNX 9600 baud
Good for 20–30m runs. Plenty for a house.
STM32F103 instead of ATmega328
72 MHz ARM Cortex-M3 · 7× faster than Arduino
CAN peripheral built-in · $1.50 in 2020
FreeRTOS + libopencm3 instead of endless loops
Real tasks · Priorities · Preemption · Hardware abstraction
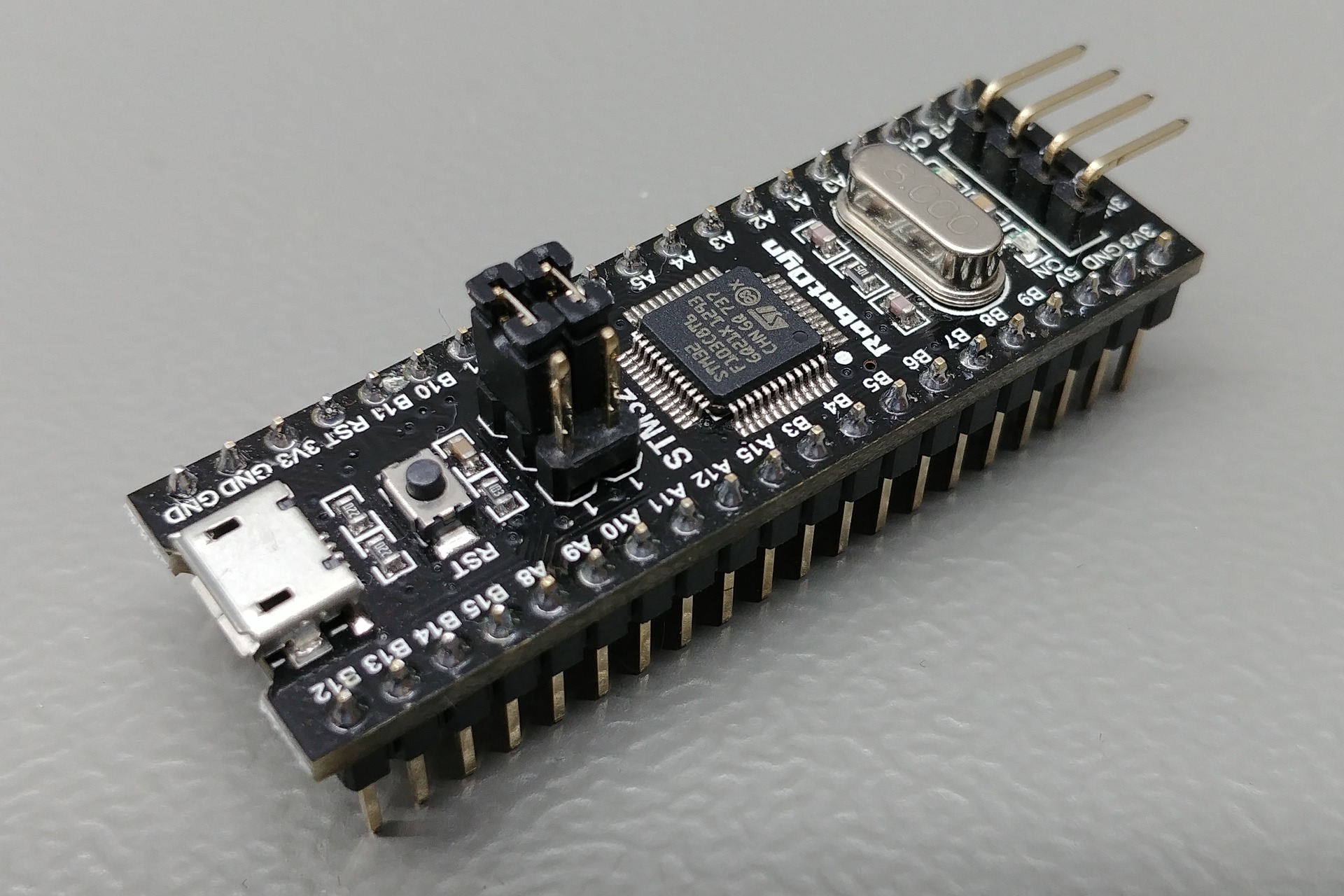
RobotDyn Black Pill · STM32F103C8T6
Birth of a Node
CAN bus instead of RS485
Multi-master · Inherent collision resolution · Resilient
Good enough for cars for decades. Industrial standard.
1 MBit instead of EIB/KNX 9600 baud
Good for 20–30m runs. Plenty for a house.
STM32F103 instead of ATmega328
72 MHz ARM Cortex-M3 · 7× faster than Arduino
CAN peripheral built-in · $15 in 2020 (COVID!)
FreeRTOS + libopencm3 instead of endless loops
Real tasks · Priorities · Preemption · Hardware abstraction
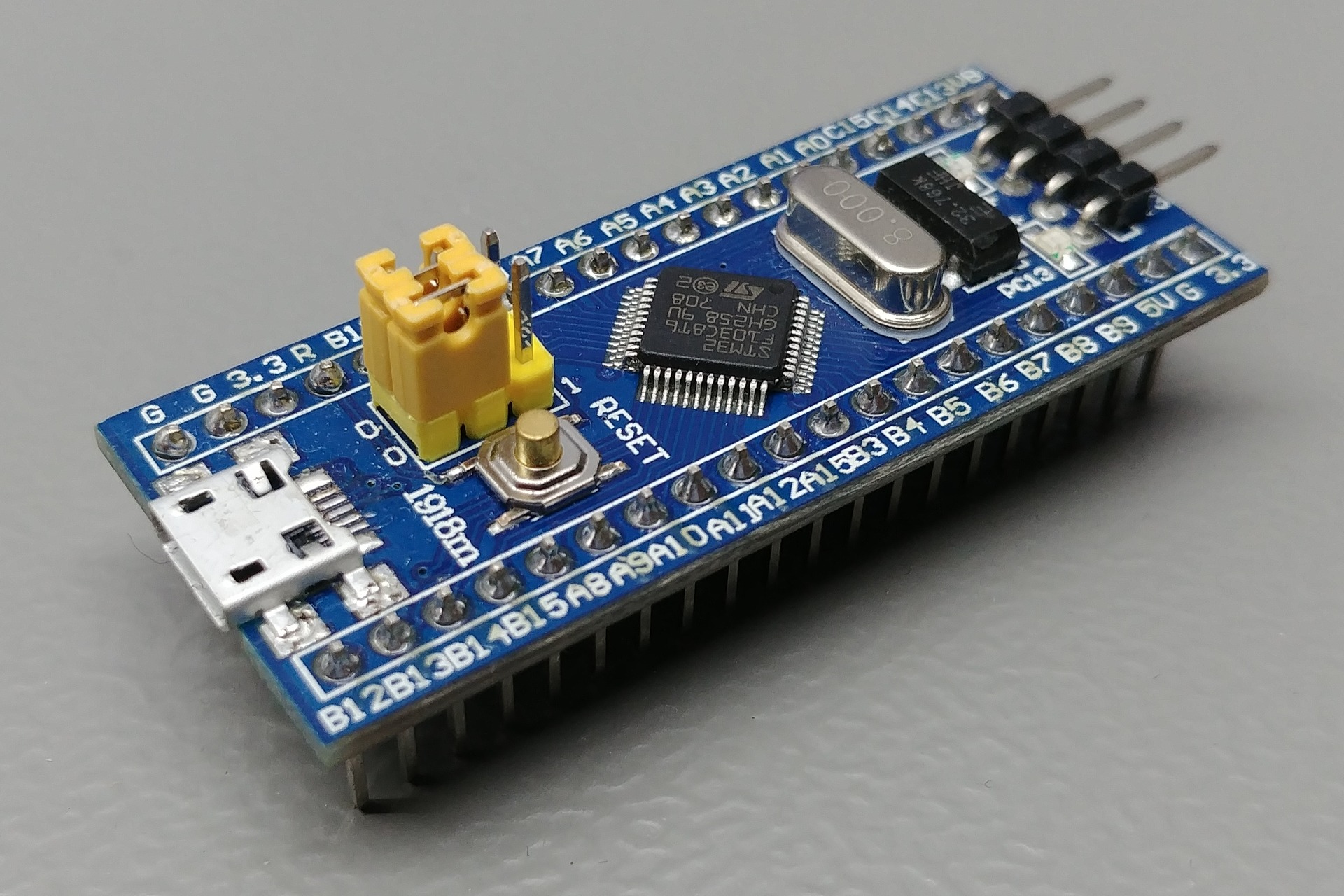
Blue Pill · STM32F103C8T6
Birth of a Node
CAN bus instead of RS485
Multi-master · Inherent collision resolution · Resilient
Good enough for cars for decades. Industrial standard.
1 MBit instead of EIB/KNX 9600 baud
Good for 20–30m runs. Plenty for a house.
STM32F103 instead of ATmega328
72 MHz ARM Cortex-M3 · 7× faster than Arduino
CAN peripheral built-in · no stock! → DIY
FreeRTOS + libopencm3 instead of endless loops
Real tasks · Priorities · Preemption · Hardware abstraction
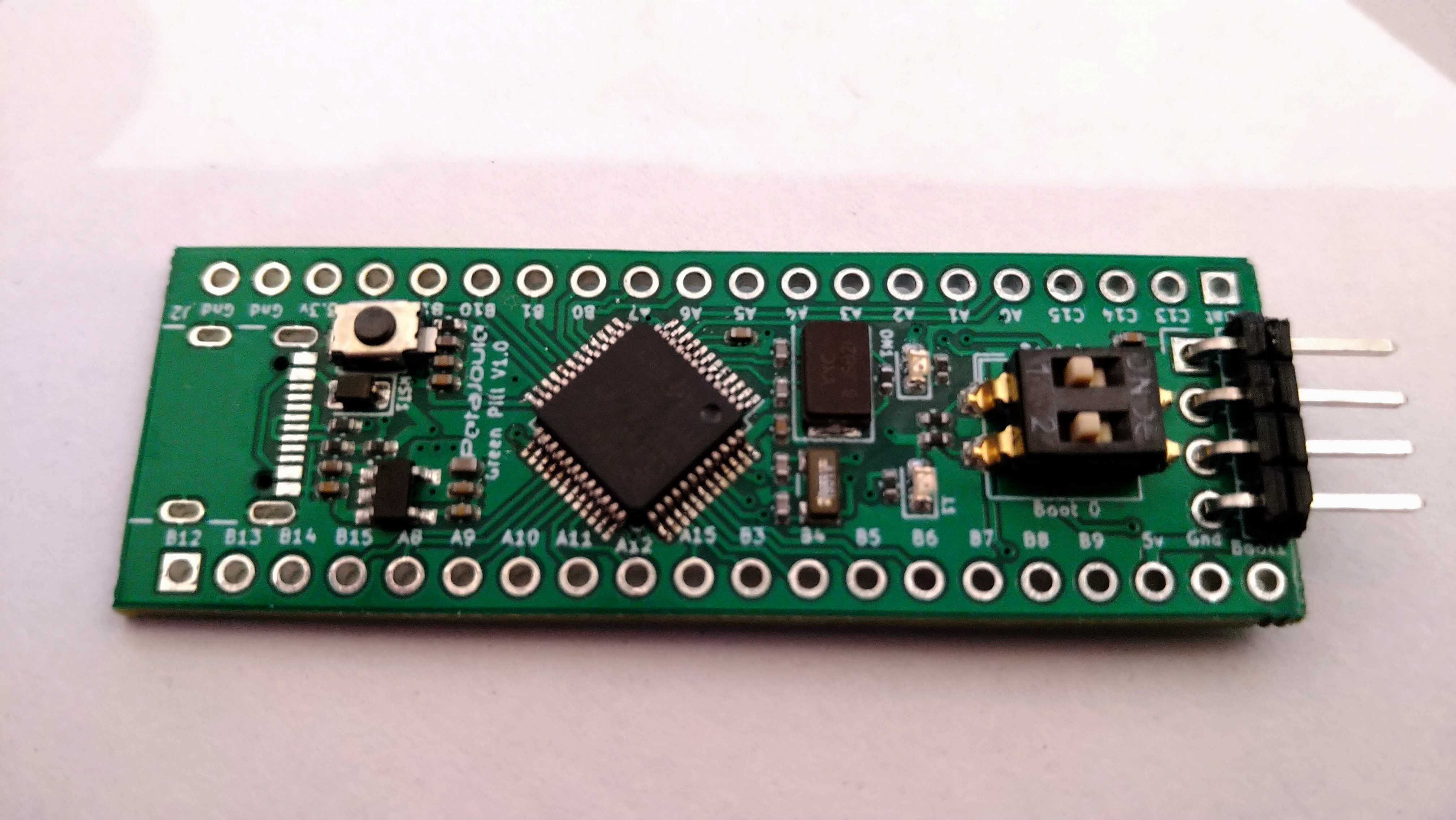
Green Pill · STM32F103C8T6 · DIY
Why CAN?
Why CAN? Hardware arbitration (CSMA/CR) · true multi-master · 1 Mbit/s · differential · industrial grade
Why not WiFi/Zigbee? No batteries to die. No mesh to collapse. Building for 50 years, not 5.
Why not RS485? No arbitration. Master-slave only. Two nodes transmit = garbage.
Why not KNX? 9600 baud (1990s design). Expensive. Closed ecosystem.
Birth of a Hub
So you have 20 nodes — now what?
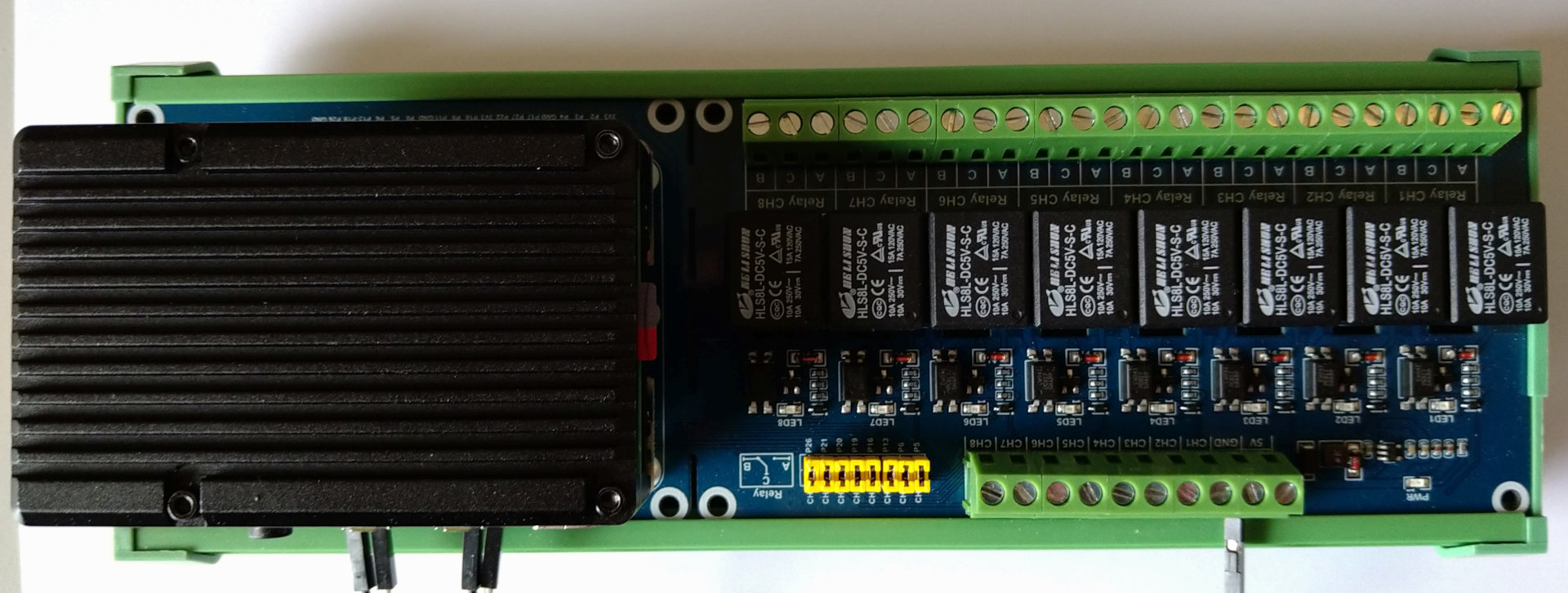
Hub assembly · DIN rail mount
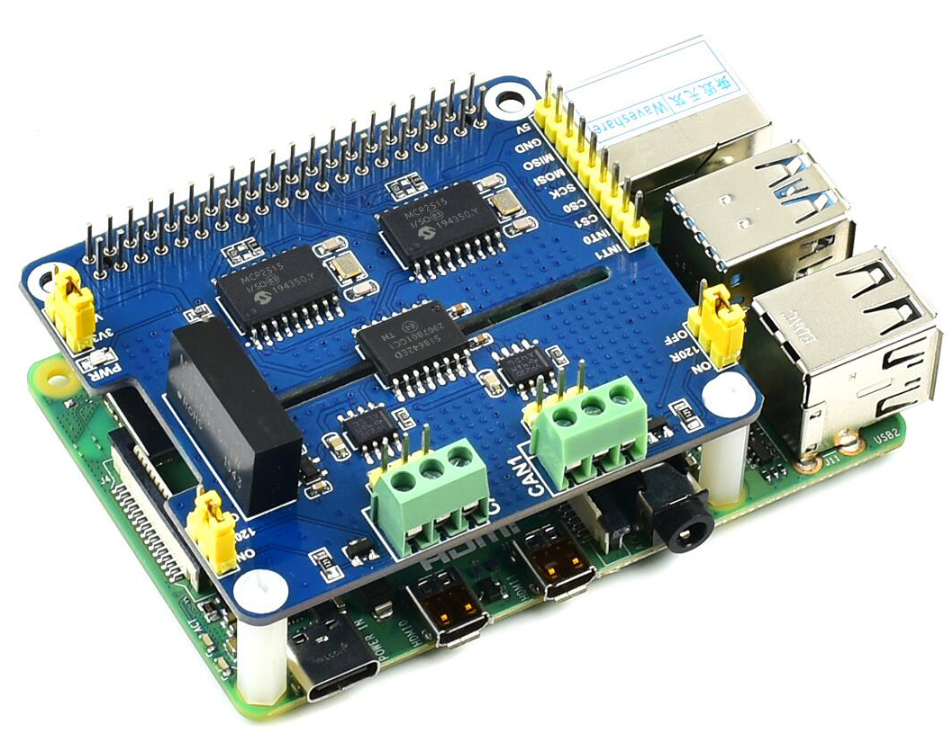
Waveshare 2-CH CAN HAT
RasPi 4B/5 · 2-ch CAN HAT · Relay Board · DIN Rail Mount · CAN/IP & CAN/CAN Gateway
WHIP Architecture
Nodes — STM32 MCUs · FreeRTOS · 1MBit CAN bus · Autonomous C / Embedded
Hubs — RasPi · CAN/IP gateway · Hub Aggregation · Protocol bridges · Mojolicious Perl
Server — Orchestration · External connectivity Perl
Higher layers are always a supplement, never a requirement.
Nodes — STM32 + FreeRTOS
Hardware
STM32F103 (Cortex-M3, 72 MHz)
STM32F303 (Cortex-M4F, FPU)
Native bxCAN controller
Software
FreeRTOS · libopencm3
No vendor HAL lock-in
One YAML = one firmware
115+
sensor/actuator modules
🌡️ BME280 · DS18x20 · SHT3x · NTC
⚡ INA219 · INA226 · ACS712 · ADC
💡 DALI · WS281x · PWM dimmer · SSR
🔌 PCF857x · MCP23017 · relay · GPIO
📡 LoRa · Modbus RTU · 1-Wire · SPI
🖥️ SSD1306 · ST7735 · status LEDs
🍃 SCD4x · SGP4x · PMS5003 · SEN5x
🛸 AS3935 (franklin) · MLX90614 · VL53L0x · HX711
Dependency resolver inspired by Linux Kconfig
~5 modules per node → 153,476,148 combinations
Ganglion
Ganglion = GANG of Lightweight I/O Nodes — insect-brain model.
IF-THEN rules, timers, local variables — compiled to bytecode on the MCU.
Nodes operate autonomously even when hub/server are down.
Ganglion — In Action
DEF LightTimeout = 300 # 5 minutes
# Motion detected: light on, start timer
IF motion:detected THEN lights:on; SET $T_0 = LightTimeout
# Timer expired: light off
IF !$T_0 THEN lights:off
# Cross-node: kitchen smoke → alarm everywhere
DEF Kitchen = 42
IF Kitchen:smoke:detected THEN buzzer:alarm(1)
Toolchain:
Wgc — Compiler (Perl)
.tgc source → .bgc bytecode (10–50 bytes)
Wgi — Interpreter
Disassembly + execution trace
Same C source as on STM32
Wgs — Simulator
Perl reference impl · full memory model
Mock sensors · timer simulation · 170 tests
Hubs — a Pantheon
Specialized RasPi hubs. Named by function, not by accident.
Raijin
⚡ Thunder god — energy: Victron, BMS, MPPT, 120 kWh batteries
Lucifer
💡 Light bearer — DALI lighting: 4 buses, scenes, presence simulation
Bragi
🎵 Norse god of poetry — multiroom audio, voice, AI assist
Gaia
🌿 Earth goddess — greenhouse, garden, pond, irrigation
Tyr
⚔️ God of war — ...you can guess.
No hub is a single point of failure. Each domain runs independently.
SELV-DALI — Lighting without mains
SELV = Safety Extra Low Voltage. Under 60V DC. Safe to touch.
The trick: Entire lighting chain runs from battery storage. 48V → 24V DC/DC → LED. No 230V AC anywhere.
DALI controls at 16V. Switches, sensors, dimmers — all SELV.
Inverters fail? Lights stay on — they bypass AC entirely.
Switch next to the bathtub? No problem. No electrician needed.

🇬🇧 English

🇩🇪 Deutsch
WHIP — Protocols & Integrations
Protocols
CAN bus 1Mbit Modbus TCP/RTU DALI MQTT SNMP I2C 1-Wire
Modbus
17 of 21 function codes · 869 tests · 91% coverage
30+ external integrations
Victron VRM · MasterTherm · PVGIS · Discord · Nextcloud · Proxmox · UniFi · ...
All protocol handlers in Perl · Mojolicious async I/O
WHIP — In production
Villa-A (Prague) — completely off-grid
- 40 kWp solar · 120 kWh LiFePO4 · 3× Multiplus-II 10kVA
- MasterTherm heat pump · capillary ceiling heating/cooling
- DALI lighting across 4 buses · distributed CAN nodes
Villa-B (Germany) — same concept, different config
Two deployments = real generalization, not "works on my machine"
Invisible when it works. Competent when it matters. Built for decades, not warranties.
03 AI does Perl
Using AI to write Perl — the practical reality
AI contributed...
A lot of Perl prototypes — some grew to standard tools
- An own PVGIS — but better (many roofs)
- Modbus, CANbus CLI command & introspection
- Heat loss / inrush simulations (better than "energy experts")
FreeRTOS / libopencm3 source
- Modularized firmware for STM32 nodes
- Over 100 modules (combinatorics!)
- Tests, build system
A lot of Perl code
- API endpoints to ... everything
- Discord, Reddit, Twitter, Kraken, Ollama, Proxmox
- AWS, Azure, Anthropic, Kodi, Nextcloud, ... you name it!
"Small" side projects
MIB Parser
SNMP::MIB::Compiler — best MIB parser. Period. open source
Grpc::FFI
gRPC for Perl — because everything else was dead open source
The CPAN Situation
2025-09-28
"User 'PETAMEM' set to nologin. Your account may have been included in a precautionary password reset in the wake of a data breach incident at some other site. Please talk to modules@perl.org to find out how to proceed."
→ Talked to modules@perl.org. No answer.
2025-10-01
"Ich leite das mal auf Steffen Winklers Empfehlung hier weiter an Dich, weil von modules@perl.org bislang keine Reaktion kam. Würde jetzt mal wieder gerne ein paar Module auf CPAN schmeissen. :-)"
→ An Andy Koenig. No answer.
2025-10-06
"Hi Sören. Weißt Du zufällig wo ich eines Andy König oder halt jemanden der mit PAUSE/CPAN weiterhelfen kann habhaft werden könnte? Wir würden mal gerne unsere Module auf Vordermann bringen, aber [...] und bei modules@perl.org oder andyk@cpan.org rührt sich keiner."
→ An Sören Laird, LinkedIn. No answer.
SNMP & MIBs — quick primer
SNMP
Simple Network Management Protocol — how you monitor and manage network devices. Routers, switches, firewalls, UPS, printers — anything with an IP.
MIB
Management Information Base — the schema. Defines what each device can report: CPU load, interface counters, temperature, error rates, ...
The problem
Thousands of vendor MIBs. Written in ASN.1. Riddled with vendor deviations from the standard. Every monitoring system needs a parser — and every parser struggles.
SNMP::MIB::Compiler
2 days with AI · CPAN module was 93% working · targeted fixes, no rewrite
| Parser | Language | Failures | Pass rate |
|---|---|---|---|
| pysmi | Python | 296 | 93.8% |
| gosmi | Go | 91 | 98.1% |
| Ours | Perl | 39 | 99.2% |
4740 MIBs · 301 fixes · 52 fewer failures than Go
 github.com/petajoulecorp/SNMP-MIB-Compiler
github.com/petajoulecorp/SNMP-MIB-Compiler
Grpc::FFI
Wanted gRPC in Perl. Everything on CPAN: dormant, dead, or broken.
So we built it. From scratch. FFI::Platypus bindings to the gRPC C API.
Learning path: UUID::FFI → SQLite::FFI → Grpc::FFI
326 tests passing · zero memory leaks · zero crashes
Cross-language: Perl client ↔ Java/Go servers — working
Streaming: unary, client, server, bidirectional
85% production ready · ~43 implementation files
And yet — this was a prelude
for something bigger.
What if FFI wasn't just a tailored library connector...
...but more integrated and automatic?
Navigator / Orchestrator
AI doesn't do this on its own.
Human: strategy, architecture, learning path, priorities
AI: execution, documentation, pattern learning, iteration
gRPC example: I decided "start with UUID, then SQLite, then gRPC"
AI executed each phase, documented lessons, graduated to the next
Without the navigator — the AI builds impressive things that go nowhere.
Without the AI — the navigator doesn't have enough hours in the day.
So... AI is quite good at Coding.
But how far can this actually go?
04 AI does Perl
Turning the predicate around.
pperl
PetaPerl / ParallelPerl
A Perl 5 interpreter — designed by humans.
Written in Rust — by many AI agents.
Serious — no toy or academic exercise.
![]()
pperl
PetaPerl / ParallelPerl
A Perl 5 interpreter Platform — designed by humans.
Written in Rust — by many AI agents.
Serious — no toy or academic exercise.
![]()
pperl — Not the first attempt
Topaz
1999 · C++ rewrite · Chip Salzenberg · abandoned
B::C / perlcc
1996–2016 · Perl-to-C compiler · dead
cperl
2015–2020 · Perl 5 fork · Reini Urban · dormant
RPerl
Restricted Perl → C++ · Will Braswell · dormant
WebPerl
Perl 5 → WebAssembly · runs in browser · semi-active
PerlOnJava
Perl 5 on JVM · Flavio Glock · active — talk at this GPW!
Common failure mode: underestimating Perl 5's complexity
pperl — Scope
Perl 5.42 — ish
Compatibility: strive for maximum Perl 5 compliance, currently 5.42
Performance: strive for V8 levels
XS: no, but yes
Native Rust implementations, integral to the interpreter
Linux only — all architectures
We really don't care about use v5.xx
pperl — Status
22,000+
tests total
~61–400 failures — give or take
Performance: good, bad and ugly
Quotes from the AI
13095 pass (+25 from previous 13070), 31 fail (down from 46!). The File::Path native implementation not only works, it unblocked 15 previously-failing tests that depended on File::Path. Zero regressions.
pperl — Benchmarks
| Benchmark | perl5 | pperl | ratio |
|---|---|---|---|
list_util::sum |
191.8K | 372.8K | 1.9x |
list_util::min |
199.8K | 772.9K | 3.9x |
list_util::max |
201.3K | 673.7K | 3.3x |
list_util::product |
2.7M | 4.0M | 1.5x |
Native Rust implementations — not XS, not C
pperl — Beyond Perl5
Maximum compatibility. But more.
✓ Autoparallelization — for/map/grep via Rayon · transparent · no threads pragma
✓ JIT Compilation — Cranelift · hot codepath detection · native code at runtime
✓ Auto-FFI — call any C library · no XS · no compilation · Peta::FFI namespace
✓ Pre-Compile — .plc blobs · skip parsing · near-instant startup
✓ Daemonize — emacs-style daemon/client · shared memory · zero cold start
Autoparallelization
Powered by Rayon — Rust's data-parallelism library
Work-stealing scheduler
Divides work into tasks, idle threads steal from busy ones — automatic load balancing
One-line change in Rust.iter() → .par_iter() — same code, parallel execution
Guaranteed data-race freedom
If it compiles, it's safe. Rust's type system enforces this at compile time.
# This just works. In parallel.
my @results = map { expensive_computation($_) } @large_list;
# No threads. No MCE. No forks.
# pperl detects safe loops → Rayon handles the rest.
--parallel flag · list ≥ 1000 items · no shared mutation
JIT Compilation
Just-In-Time — compile to machine code while running
How it works in pperl:
- Interpreter runs normally — profiling hot paths
- Hot loop detected → lower to Cranelift IR
- Cranelift compiles IR → native machine code
- Next iteration runs as native code — zero dispatch overhead
Cranelift — the compiler backend behind Wasmtime and Rust's alternative codegen.
Production-proven. Targets: x86-64 · AArch64 · s390x · RISC-V
# pperl detects this as a hot loop pattern
my $sum = 0;
for my $i (1 .. 1_000_000) {
$sum += $i;
}
# → Cranelift compiles to native machine code
JIT — First Win
Inner loop JIT — single hot loop compiled to native code
| Benchmark | perl5 | pperl interpreted | pperl JIT | vs perl5 |
|---|---|---|---|---|
| Mandelbrot | 133ms | 1493ms | 41ms | 3.2× faster |
| Ackermann | 13ms | 630ms | 12ms | 1.1× faster |
The JIT fired and the test passes! The answer is correct (500000500000).
Good. But only the innermost loop is compiled. What about nested loops?
$py = 0; while ($py < $height) { $y0 = $y_min + $py * $y_step; $row_off = $py * $width; $px = 0; while ($px < $width) { $x0 = $x_min + $px * $x_step; $zr = 0.0; $zi = 0.0; $iter = 0; while ($iter < $max_iter) { $r2 = $zr * $zr; $i2 = $zi * $zi; last if ($r2 + $i2 > 4.0); $zi = 2.0 * $zr * $zi + $y0; $zr = $r2 - $i2 + $x0; $iter++; } $frame[$row_off + $px] = $color_lut[$iter]; $px++; } $py++; }
JIT — The Code
Mandelbrot set
Triple-nested while loop
19 variables · float arithmetic
Pure Perl.
No XS. No Inline::C.
No tricks.
JIT — Full Nested
All 3 loop levels compiled as one native function
| Mandelbrot 1000×1000 | perl5 | pperl interpreted | pperl JIT | vs perl5 |
|---|---|---|---|---|
| Wall time | 12,514ms | — | 163ms | 76× faster |
200 million escape iterations of float arithmetic.
19 variables, 3 loop levels — Cranelift register-allocates across all of them.
Perl. With JIT. That's a sentence nobody expected.
Autoparallel JIT — Full Win
JIT + Rayon: compile to native, then split across cores
| Mandelbrot | perl5 | pperl JIT | pperl JIT + 8 threads | vs perl5 |
|---|---|---|---|---|
| 1000×1000 | 12,514ms | 163ms | 29ms | 431× faster |
| 4000×4000 | ~200s | 2,304ms | 342ms | ~580× faster |
JIT alone: 76×. Adding 8 threads: another ~7× on top.user 2.6s vs real 0.34s — near-linear scaling across cores.
Demo Time!
✓ Auto-FFI
No XS. No Inline::C. No compilation. Just call C.
# Layer 0 — Raw: any library, you provide type signatures
use Peta::FFI qw(dlopen call);
my $lib = dlopen("libz.so.1");
my $ver = call($lib, "zlibVersion", "()p");
say "zlib: $ver"; # 1.3.1
# Layer 1 — Pre-baked: curated signatures, zero ceremony
use Peta::FFI::Libc qw(getpid strlen strerror uname);
say strlen("hello"); # 5
my @info = uname();
say "$info[0] $info[2]"; # Linux 6.18.6-arch1-1
Pack-style type codes: (p)L = strlen(const char*) → size_t
50+ native Rust modules already built in — Auto-FFI extends to everything else
Auto-FFI — Details
Powered by libffi — any signature works, no pre-generated stubs
| Layer | Scope | Mechanism |
|---|---|---|
| Raw (Layer 0) | Any .so on the system | dlopen + dlsym + libffi call frame |
| Pre-baked (Layer 1) | libc, libuuid, ... | Direct Rust libc::* calls — zero overhead |
| Discovery (Layer 2) | System-wide scan | scan() → hashref of { soname => path } |
# Layer 2 — What's on this system?
use Peta::FFI qw(scan dlopen call);
my $libs = scan();
say scalar(keys %$libs), " libraries found";
if (exists $libs->{"libz.so.1"}) {
my $z = dlopen("libz.so.1");
say "zlib: ", call($z, "zlibVersion", "()p");
}
Libc: ~30 functions (process, strings, env, math, file, time)
UUID: 6 functions via dlopen — dies with install hint if missing
✓ Bytecode Cache (.plc)
Like Python's .pyc — but for Perl. Opt-in.
# Default: no caching (safe for development)
$ pperl script.pl
# Enable: compile once, load from cache on subsequent runs
$ pperl --cache script.pl
# Invalidate all caches
$ pperl --flush
First run: parse → codegen → execute → save .plc
Second run: load .plc → execute (no parsing, no codegen)
Bytecode Cache — Details
Storable-model: bincode deserializes directly to final runtime types. Zero intermediate conversion.
| Benchmark | perl5 | pperl | pperl --cache |
|---|---|---|---|
three_modules |
22.3ms | 12.6ms | 9.9ms |
mixed_native_fallback |
26.3ms | 13.0ms | 10.0ms |
deep_deps |
18.1ms | 13.1ms | 9.9ms |
Net module-loading cost: 33–37% faster with cache. Biggest win on fallback modules. Native Rust modules already near-zero cost.
SHA-256 keyed · mtime + version validation · aggressive format versioning
✓ Daemonize
Emacs-style daemon/client model
$ pperl --daemon script.pl # compile, warm up, listen
$ pperl --client script.pl # connect → fork → run → respond
$ pperl --stop script.pl # clean shutdown
First run: parse → codegen → execute (warm-up) → listen
Client request: connect → fork() → child inherits arenas → execute → respond
fork() gives each client a fresh address space
with all arenas already mapped — zero I/O, zero parsing, zero deserialization
Daemonize — Details
| Benchmark | perl5 | pperl | --cache | --daemon |
|---|---|---|---|---|
| 5 native modules | 15.0ms | 4.3ms | 4.3ms | 4.6ms |
| fallback + native mix | 23.5ms | 15.8ms | ~10ms | 5.0ms (3.2×) |
Eliminates both startup costs: process creation (~3-4ms) + module compilation (0-15ms)
Faster than bytecode cache — no deserialization, arenas are already in memory
Unix domain socket · JSON wire protocol · copy-on-write pages via fork()
Daemonize — Prior Art
| Solution | Scope | Isolation | State leakage | Status |
|---|---|---|---|---|
| PPerl | General CLI | None | Yes | Dead (2004) |
| SpeedyCGI | CGI | None | Yes | Dead (2003) |
| mod_perl | Apache | Per-child | Per-request | Maintained |
| Starman | PSGI | Per-worker | Per-request | Maintained |
| FastCGI | Web | Per-process | Per-request | Maintained |
| pperl daemon | General CLI | Per-request (fork) | None | Active |
All prior solutions: same interpreter across requests — state leakage by design
pperl: fresh child per request via fork() — compiled arenas via COW, clean runtime state
Future pperl
⏳ Seamless GPU — restricted Perl → OpenCL/HIP/Vulkan/CUDA kernel · same code, GPU execution
⏳ pperl-mini — tailored and scaled down versions. Maybe on a Raspberry Pico one day?
⏳ pperl-compiler — Maybe code running on a STM32 one day?
When to use pperl
Good fit:
- Workloads that benefit from JIT and/or autoparallelization
- Scripts using native builtins (50+ Rust modules, fast)
- Fast startup — inherently ~2× faster than perl5, plus --cache
- pperl-specific features: Auto-FFI, Daemonize, Bytecode Cache
- Security: different codebase — unlikely to share CVEs with perl5
- Smaller, less complex scripts
Not yet:
- Large, complex codebases — edge cases where pperl differs from perl5
- We strive for maximum compatibility, but we're not 100% there yet
Rule of thumb: the longer and more complex the script,
the more likely you hit a corner case. If you don't want to touch the code — use perl5.
Correctness Case Study
How serious is "maximum compatibility"?
The bug: $, (OFS) vs $\ (ORS) in print
pperl checked both with the same flag mask. Perl5 doesn't.
perl5 — $, (OFS)
if (SvGMAGICAL(ofs) || SvOK(ofs))
Checks get-magic AND ok-flags
perl5 — $\ (ORS)
if (PL_ors_sv && SvOK(PL_ors_sv))
Checks ok-flags only. No get-magic.
pperl had:
// Same mask for both — SVS_GMG included for ORS. Wrong.
if flags & (SVF_IOK | SVF_NOK | SVF_POK | SVF_ROK | SVS_GMG) != 0
Practical impact: near zero.
To trigger this, you'd need a tie on $\ whose FETCH returns undef, while the underlying SV has get-magic set but none of IOK/NOK/POK/ROK — and then call print. Nobody writes this. Nobody has ever written this.
We fixed it anyway.
The depth of compatibility is the product's guarantee.
I have been doing
AI with Perl
for a few decades. Now it is time to let
AI do Perl.
Get it here:
 perl.petamem.com
perl.petamem.com
Danke.
Richard Jelinek · rj@petamem.com
PetaMem s.r.o. · petamem.com
One more thing.
psh
An interactive Perl shell
ls "-la"; # it's just a sub call
cd "/tmp"; # chdir wrapper
ps "aux"; # system command
# But you're already in a scripting language:
for my $f (glob("*.log")) {
if (-M $f > 7) {
rm $f;
say "cleaned $f";
}
}
Object pipes — pass data structures, not text:
ps() | grep { $_->{mem} > 100_000 }
| sort { $b->{cpu} <=> $a->{cpu} };
PowerShell's philosophy · Perl's text power · pperl's JIT speed