Most underwater robots lose contact with the surface the moment they descend. But a new antenna technology, borrowed from the physics of medical implants, is rethinking how submarine machines talk to each other – and to us.
Radio waves are nearly useless beneath the surface. In saltwater, conventional signals attenuate between 1 and 10 dB per meter, limiting range to just a few feet. Acoustic communication works at longer ranges but introduces Doppler distortion (frequency shift from movement), multipath interference (echoes bouncing off the seafloor and surface), and noise that can harm marine life. Optical systems are blazing fast but require a direct line of sight and fail in murky water or when the buildup of microorganisms degrades the lenses. The net result is that most underwater robots today either exchange short status pings or must surface to transmit mission data, severely limiting real-time autonomy.
A new antenna called BlueME has been designed to change this. This new communication system was developed by a team at the University of Florida, and lets autonomous underwater vehicles (AUVs) exchange data reliably at distances of up to 730 m (2,395 ft) while drawing around 10 watts of power, less than a household LED light bulb.
The work, accepted in the IEEE Journal of Oceanic Engineering, grew out of an unlikely research background. Project co-lead Adam Khalifa spent years designing miniature wireless implants before he noticed something obvious in hindsight. "At one point it clicked that many of the same physical challenges inside the human body also exist underwater," he explains. "Our body is effectively made of lightly salted water. That realization opened the door to thinking about ocean communication in a completely different way."
BlueME's key innovation is a magnetoelectric (ME) antenna, a device that couples two physical effects in sequence. A magnetic field deforms a magnetostrictive layer made from a material called Metglas, and that mechanical deformation then induces a voltage in an adjacent piezoelectric layer (PZT, a common ceramic used in sensors and actuators). Run the process in reverse, and you have a transmitter. The result is an antenna that operates at very low frequencies, around 35–36 kHz, while remaining far more compact than the conventional electrical antennas that work at those same frequencies.
The full system packs 15 such antennas into a 3x5 array, housed in oil-compensated waterproof enclosures that equalize the crushing hydrostatic pressure at depth. What makes the design counterintuitive is that ME antennas actually improve when submerged. At 36 kHz, the wavelength shrinks from roughly 8,327 m (27,320 ft) in air to just 170 m (558 ft) in freshwater – a compression that dramatically boosts radiation efficiency for small antennas. Running 15 antennas together multiplies radiated power by a factor of 225 compared to a single element; combine that with a matched receiver array, and the theoretical total link improvement reaches approximately 119 dB.
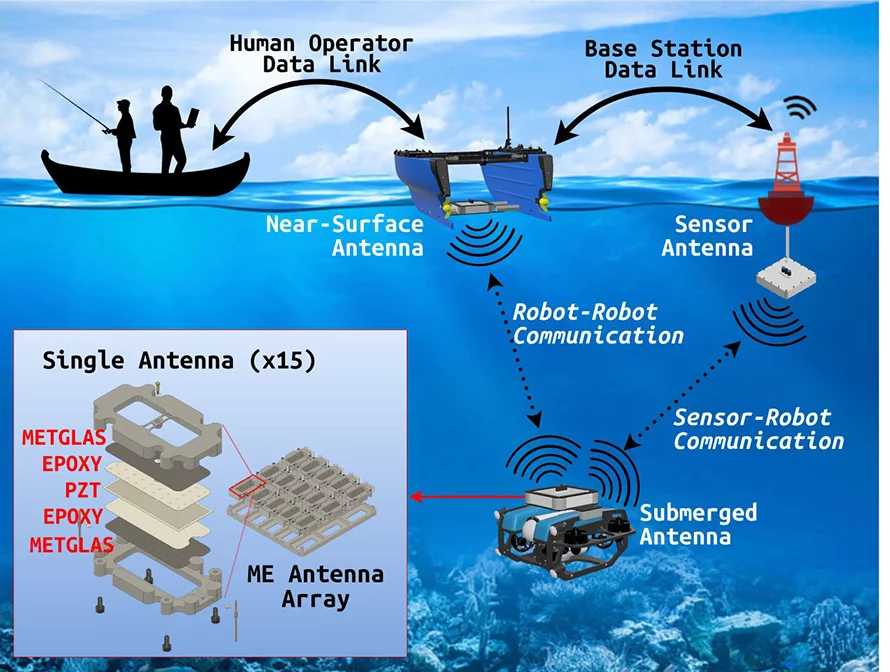
A diagram of the BlueME system, showing how magnetoelectric antennas relay data between a surface operator and a submerged robot
Md Jahidul Islam, Ph.D., and Adam Khalifa, Ph.D./UF
The team ran open-water trials at two sites: Lake Wauburg in Gainesville, Florida (freshwater), and the Florida Gulf Coast (saltwater). In freshwater, BlueME maintained reliable communication at 200 m (656 ft) on just 1 watt. In saltwater, the system detected signals at 730 m (2,395 ft) on under 10 watts – and performance held steady regardless of turbidity, obstacles, or multipath interference.
Data rates sit between 1 Kb/s and 100 Kb/s, far below the gigabit speeds optical systems can achieve in ideal conditions. But speed was never the point. "Imagine the robot pings you back every 10 minutes on how the mission is going, and the operator can make real-time decisions and maybe adapt the mission," says co-lead Md Jahidul Islam.
The paper represents, according to its authors, both the first practical outdoor deployment of ME antennas and the largest Very Low Frequency/Low Frequency array of this type ever built. The team has filed a provisional patent and is seeking funding to refine the hardware and conduct trials aboard full-scale AUVs, with potential applications in cooperative fleet navigation, seafloor mapping, and real-time localization.
"We demonstrated these results with very limited initial resources," Khalifa notes. "With dedicated development and larger-scale deployment, the possibilities become much broader."
"We are talking about the very early days of a very powerful product," adds Islam.
Source: University of Florida